身体に軽く触れることで示される無意識的な二者間姿勢協調と社会的関係性との関係|女性用性感マッサージsofre
日常生活やリハビリテーション場面において,身体接触を介して二者の姿勢や運動が影響し合うこと(例えば,手を繋いで歩く,動作介助など)があります.実際,立位姿勢でお互いに軽い身体接触を行うと,両者の姿勢の揺らぎが無意識的に類似することが知られています.
手を繋いで歩く,ペアでのダンス,そして介護やリハビリテーション場面における動作介助など,身体接触を介して二者の姿勢や運動が影響し合うことがあります.
この際,身体接触から加えられる情報は,接触による力学的要因と感覚的要因に分けられます.
加えられる力による姿勢や運動への影響は明らかなことですが,研究では,後者の感覚的要因,つまり身体接触により生じる触覚情報の影響に着目しています.
ヒトの安静立位は一見すると安定しており,運動は生じていないようにみえますが,実際には狭い範囲で常に姿勢は揺ぎながら安定しています.
この際,二者が互いに軽い身体接触を行うと,両者の姿勢の揺らぎが無意識的に類似すること(二者間姿勢協調)が知られています.
これは,姿勢を制御するために用いている感覚情報に,パートナーの姿勢の揺らぎを反映した触覚情報が取り入れられるために生じると考えられています.
一方,社会心理学的な知見によると,運動の二者間協調(模倣や身体同調などとも呼ばれています)は両者の社会心理学的な関係の良さを反映するとともに,良好な関係を形成する“社会的接着剤”として機能していることが知られています.
しかし,これまでの研究では,立位姿勢の揺らぎという複雑で無意識的な運動の二者間協調に対して,社会的な関係の良さが影響しているかは明らかになっていませんでした.
そこで研究では,身体接触による触覚情報から生じる無意識的な二者間姿勢協調と,相互作用する二者の社会的関係性との関係を検討しました.
実験では,既存の社会的関係(知人,友人または親友)にある同性ペアを対象に,それぞれパートナーへの関係性(親密度)を評価しました.
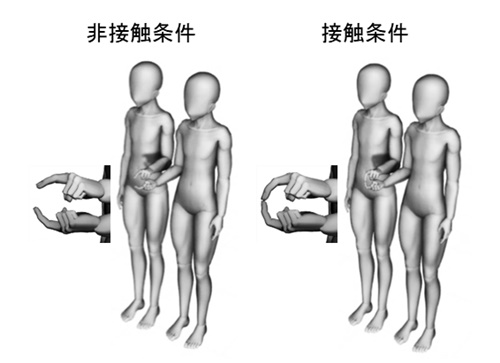
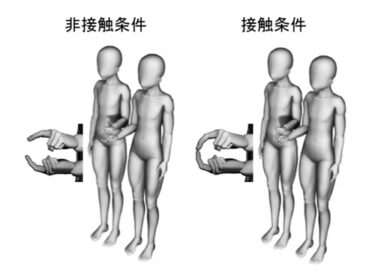
その後,閉眼安静立位姿勢にて身体接触を行わない条件(非接触条件)と,接触による力学的影響を最小化するライトタッチという方法(約102g未満の接触力)で軽い身体接触を行う条件(接触条件)の姿勢の揺らぎを二者同時測定し,姿勢の揺らぎの類似性とペアの親密度との関係を分析しました.
結果,対象者の自覚なしに接触条件では非接触条件に比べて高い揺らぎの類似性を認め,接触条件で無意識的な二者間姿勢協調を生じていることが確認されました.
さらに,この姿勢協調の程度とペアの親密度との関係を分析したところ,左右方向(パートナーが立っている側)における姿勢協調の程度と親密度においては正の関係(親密度が高いほど姿勢の揺らぎが類似する)を示したのに対し,前後方向では負の関係(親密度が低いほど姿勢の揺らぎが類似する)を示しました.
つまり,身体接触による触覚情報から生じる無意識的な二者間姿勢協調は,相互作用する二者の社会的な関係性(親密度)と関係していることが明らかとなりました







 女性用性感マッサージsofre埼玉" width="1280" height="853" >
女性用性感マッサージsofre埼玉" width="1280" height="853" >
